digitalWrite()
Описание
Выводит значение HIGH или LOW на указанный порт робота. В качестве портов используются разъемы TinkerKit.
Синтаксис
Robot.digitalWrite(port, value)
Параметры
port: TKD0 - TKD5 (на управляющей плате), B_TK1 - B_TK4 (на плате приводов) или LED1 (расположен на управляющей плате)
Возвращаемые значения
нет
Пример
#include <ArduinoRobot.h>
void setup(){
Robot.begin();
}
void loop(){
Robot.digitalWrite(TDK0, HIGH); // включаем светодиод Tinkerkit, подключенный к порту TDK0
delay(1000);
Robot.digitalWrite(TK0, LOW); // выключаем светодиод
delay(1000);
}
Примечание
Нельзя вызывать функцию Robot.digitalWrite() с параметром TK0 - TK7
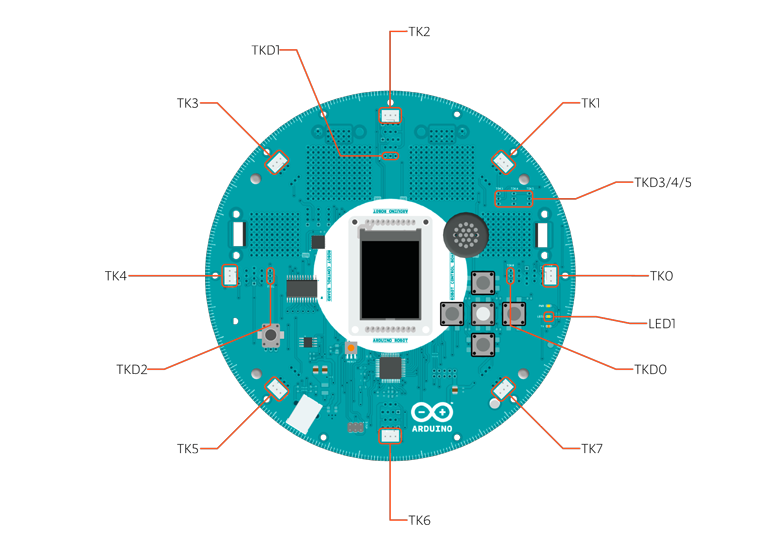
Управляющая плата (Control Board)

Плата приводов (Motor Board)
