analogWrite()
Описание
Выводит аналоговое значение на указанный порт робота в виде ШИМ-сигнала. В устройстве предусмотрен 8-битный ШИМ, позволяющий получить 256 дискретных уровней.
Функция Robot.analogWrite() работает только с портом TKD4, расположенным на управляющей плате, и не может использоваться одновременно с TK0 - TK7.
Синтаксис
Robot.analogWrite(port, value)
Параметры
port: TKD4
value: от 0 до 255
Возвращаемые значения
нет
Пример
#include <ArduinoRobot.h>
void setup(){
Robot.begin();
Serial.begin(9600);
}
void loop(){
for(int x=0;x<256;x++){
Robot.analogWrite(TKD4, x); //увеличиваем яркость светодиода, подключенного к TK0
delay(20);
}
}
Примечание
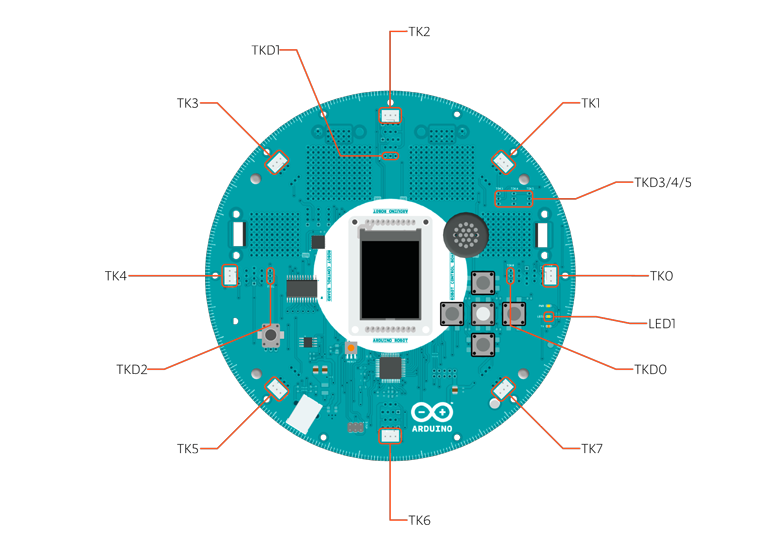
Управляющая плата робота (Control Board)
