digitalRead()
Описание
Считывает с указанного порта цифровой сигнал. В качестве портов используются разъемы TinkerKit, расположение которых показано на диаграммах ниже.
Синтаксис
Robot.digitalRead(portName)
Параметры
portName: В качестве имени порта могут быть указаны TK0 - TK7 (на управляющей плате), TKD0 - TKD5 (на управляющей плате) и B_TK1 - B_TK4 (на плате приводов).
Возвращаемые значения
Пример
#include <ArduinoRobot.h>
void setup(){
Robot.begin();
Serial.begin(9600);
}
void loop(){
Serial.println(Robot.digitalReadPort(TK0)); //выводим значение, считанное с порта TK0
delay(100);
}
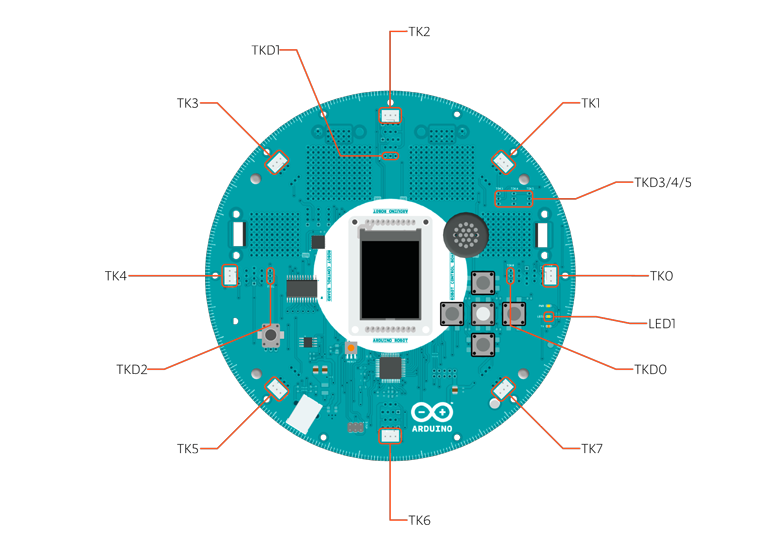
Управляющая плата (Control Board)

Плата приводов (Motor Board)
